Sistema di tracciamento del cordone laser per l'automazione della saldatura
Sistema di tracciamento del cordone laser per l'automazione della saldatura RF627Smart-Weld
Il Seam Tracking System è progettato per essere utilizzato nei sistemi di saldatura robotizzata ed è destinato a controllare automaticamente la posizione della torcia di saldatura durante il processo di saldatura.
Struttura del sistema RF627Smart-Weld:
![]()
Caratteristiche principali:
■ collegamento diretto dello scanner al controller del robot senza un modulo di calcolo intermedio;
■ controllo del movimento del robot e ciclo completo del processo di saldatura;
■ interfacce integrate per robot popolari;
■ file già pronto di vari tipi di giunti di saldatura;
■ costruzione semplice e intuitiva di un algoritmo di lavoro all'interno dell'interfaccia WEB dello scanner utilizzando un grafico di blocchi intelligenti;
■ visualizzazione del tracciamento 3D in tempo reale;
■ il set di scanner di varie gamme, ottimizzati per lavorare in condizioni di saldatura.
Specifiche:
| Frequenza di campionamento, accuratezza, risoluzione | |
| Frequenza di campionamento nominale (campo di lavoro completo) |
484 profili/s (modalità standard), 938 profili/s (modalità DS) |
| Frequenza di campionamento massima (modalità ROI) |
4884 profili/s, 6379 profili/s (modalità DS) |
| Linearità (errore di misura), asse Z |
±0,05% della portata (modalità standard), ±0,1% della portata (modalità DS) |
| Linearità (errore di misura), asse X | ±0,2% dell'intervallo |
| Risoluzione, asse Z |
0,01% della portata (modalità standard) 0,02% della portata (modalità DS) |
| Risoluzione, asse X | 648 o 1296 punti (valore programmabile) |
| Laser | |
|
660 nm o 450 nm Classe 2M secondo IEC/EN 60825-1:2014 |
|
| Interfaccia | |
| Di base | Ethernet / 1000 Mbps |
| Ingresso di sincronizzazione | RS422, 3 canali |
| Alimentazione elettrica | 9...30 V o 12...36 V per scanner con laser blu |
| Consumo energetico, non di più | 6 W (senza riscaldatore integrato) |
| Resistenza ambientale | |
| Valutazione della custodia | IP67 |
| Vibrazione | 20 g / 10...1000 Hz, 6 ore per ciascuno degli assi XYZ |
| Shock | 30 g / 6 ms |
| Temperatura ambiente di esercizio |
-20...+40 o -20...+80 per scanner con sistema di raffreddamento ad aria integrato -20...+150 per scanner con sistema di raffreddamento ad acqua integrato |
| Temperatura di stoccaggio °С | -20...+70 |
| Umidità relativa | 5-95% (senza condensa) |
| Materiale alloggiamento/finestre | alluminio/vetro |
| Finestre protettive sostituibili | bicchiere |
Campi di lavoro e dimensioni complessive:
| Allineare | Signor, mm | SMR, mm | Хsmr, mm | Xemr, mm | Dimensioni, figura | Peso (kg | Opzione: raffreddamento ad aria o ad acqua, disegno, figura | Opzione: tapparella, figura |
| 65/25-20/22 | 25 | 65 | 20 | 22 | 1 | 0.7 | 2 | 3 |
| 70/50-30/41 | 50 | 70 | 30 | 41 | 1 | 0.7 | 2 | 3 |
| 76/100-48/82 | 100 | 76 | 48 | 82 | 1 | 0.7 | 2 | 3 |
| 70/130-40/86 | 130 | 70 | 40 | 86 | 4 | 0.7 | 4 | 4 |
| 250/130-52/76 | 130 | 250 | 52 | 76 | 5 | 0.9 | 5 | 5 |
| 82/200-60/150 | 200 | 82 | 60 | 150 | 1 | 0.7 | 2 | 3 |
| 90/250-65/180 | 250 | 90 | 65 | 180 | 1 | 0.7 | 2 | 3 |
Dimensioni di ingombro e di montaggio degli scanner laser:
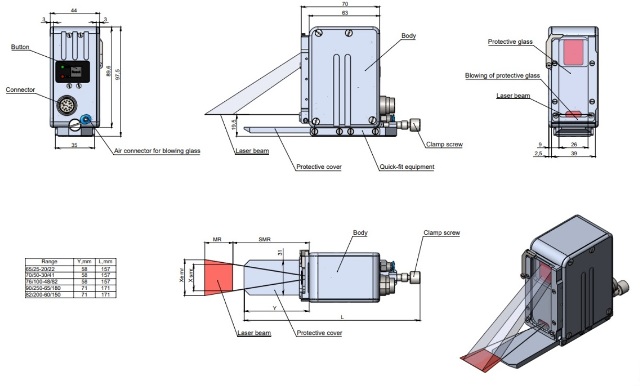
Fig.1
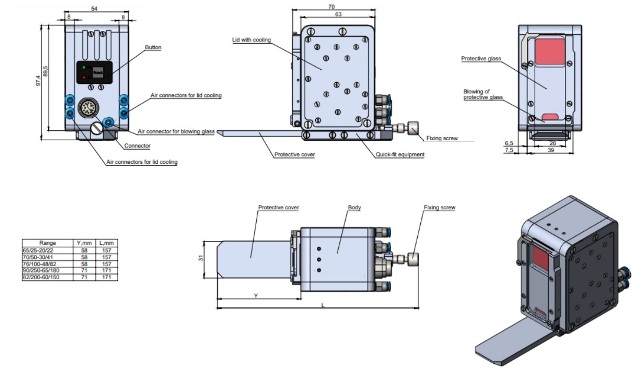
Fig.2
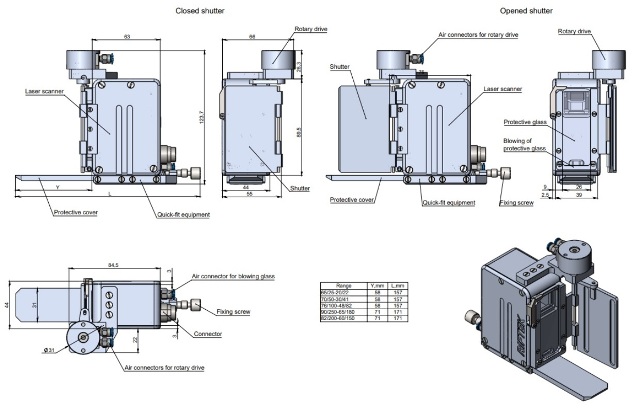
Fig.3
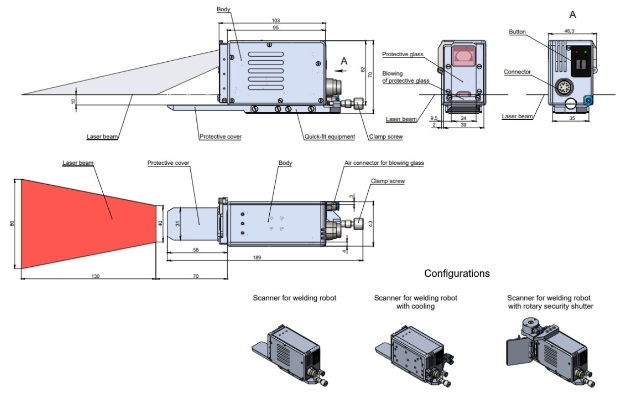
Fig.4
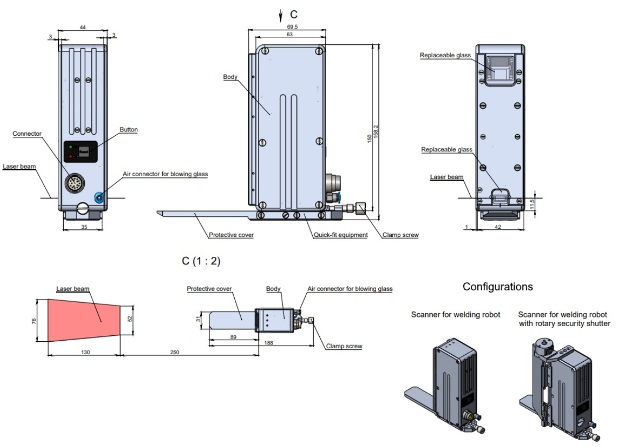
Fig.5
Tablet industriale robusto
Il tablet è destinato alla configurazione iniziale del sistema da parte di un tecnico e al successivo controllo del funzionamento del sistema da parte del regolatore e dell'operatore del robot di saldatura.
Il software preinstallato è progettato per visualizzare l'interfaccia grafica e gestirne le impostazioni, tenendo conto del controllo degli accessi (tecnico/regolatore/operatore).
Poiché il tablet ha solo scopo di visualizzazione, configurazione e diagnostica (non esegue calcoli), l'utente può utilizzare altri mezzi tecnici (altri tipi di tablet, computer personali o industriali). Nel caso di utilizzo di altri mezzi tecnici, è necessario seguire le istruzioni fornite nella documentazione dello scanner RF627Smart.

Fig.6
Caratteristiche Tecniche:
| Parametro | Valore | |
| Architettura | processore | Intel cherry trail Z8350, 1,44 Ghz-1,92 GHz |
| Sistema operativo | Windows 10 pro | |
| RAM/ROM | 4GB+64GB | |
| Schermo | Misurare | 10,1" |
| Risoluzione | 1920x1200 | |
| Tipo di tocco | Capacitivo | |
| Interfacce | Digitare un | USB 2.0 x1 |
| Tipo-А | USB.0x1 | |
| Micro USB | x1 | |
| Ethernet RJ45 | 10/100/1000Mx1 | |
| DB9RS232 | Porta seriale a 9 pin x1 | |
| Interfaccia di alimentazione CC | CC 12V 2A x1 | |
| Valutazione della custodia | Grado di protezione | Impermeabile IP65, ma in realtà è design IP67. Caduta 1,2 m, 6 lati |
| Standard di certificazione | Militare 810G. CE UE, FCC USA | |
| temperatura di esercizio | -20°C...60°C | |
| Batteria incorporata | Tipo di batteria | Batteria ai polimeri di litio rimovibile incorporata |
| Capienza stimata | 10500 mAh | |
| Dimensioni | 275х180x20 mm | |
Interruttore Ethernet industriale
Lo switch è progettato per fornire l'interazione di rete tra il tablet e lo scanner 2D, nonché per scambiare dati con il controller del robot.
È consentito utilizzare uno switch di rete standard incluso nel kit di saldatura (ad esempio, tra il robot e il controller). In questo caso, assicurati che le impostazioni di rete siano corrette.
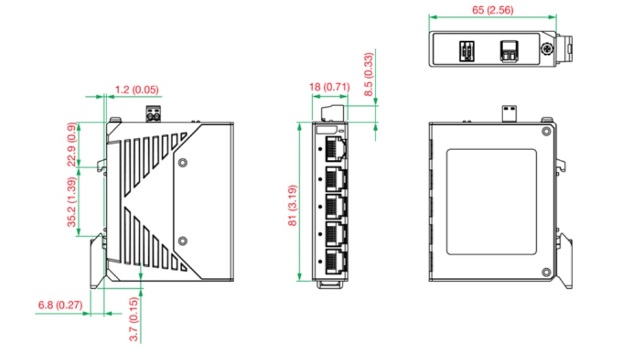
| Parametro | Valore |
| Porte di rete | 5-RJ45-10/100/Mbps |
| Alimentazione elettrica | 10...60V - 1.1W - 0.045А |
| Condizioni operative |
Temperatura: -10...60°С Umidità dell'aria: 5...95% |
| Valutazione della custodia | IP40 |
| Dimensioni | vedere la figura 7 |
Unità di protezione
Questa unità fornisce protezione dell'alimentazione per lo scanner laser 2D e include un fusibile a sostituzione rapida.
PRINCIPIO DI FUNZIONAMENTO
■ Lo scanner laser è montato sulla flangia del robot accanto alla torcia di saldatura in modo tale che durante il processo di saldatura e il movimento lungo la scanalatura di saldatura, lo scanner si trovi davanti allo strumento di saldatura.
■ Lo scanner è calibrato per ottenere la matrice di trasformazione delle coordinate. La procedura di calibrazione è descritta nel Manuale dell'utente per RF627Smart: https://riftek.com/upload/iblock/65a/2D_Laser_Scanners_eng.pdf
■ Utilizzando l'interfaccia web dello scanner, viene formato un grafico di calcolo dalla libreria di blocchi intelligenti, tenendo conto delle specifiche dell'apparecchiatura, vale a dire il tipo di robot, il protocollo di comunicazione, il tipo di scanalatura, i parametri geometrici dei modelli di scanalatura utilizzati per controllare la posizione e vincoli ad essi applicati, ecc. Se il file fornito non contiene il modello di scanalatura richiesto, l'utente può creare un nuovo modello autonomamente o con il supporto del produttore utilizzando l'editor di modelli fornito (vedere il Manuale dell'utente per RF627Smart).
■ Lo script per il controllo del blocco traccia scanalatura e del robot di saldatura è in fase di configurazione. Lo script di controllo prevede l'esecuzione ciclica delle principali fasi di saldatura: posizionamento dell'utensile di saldatura nella posizione di partenza, spostamento dell'utensile nella direzione dell'inizio del solco (ricerca del punto di ingresso nel solco), portare l'utensile in inizio della scanalatura e generazione di segnali a sistemi esterni (controller di saldatura) sulla necessità di accensione e altre azioni, arresto del movimento del robot, trasferimento al robot delle coordinate per il movimento dell'utensile lungo la scanalatura di saldatura, portando l'utensile al fine del solco e generando segnali a sistemi esterni (controller di saldatura) sulla necessità di ridurre la corrente o spegnere l'arco (e altre azioni), riportando l'utensile nella sua posizione originale.
■ Durante il funzionamento, ogni profilo ricevuto dallo scanner viene elaborato secondo l'algoritmo specificato dal grafico e vengono eseguite le seguenti fasi: rilevamento della sagoma della scanalatura di saldatura per determinare le coordinate esatte nel sistema di coordinate dello scanner (2D) , trasformazione le coordinate dal sistema di coordinate dello scanner al sistema di coordinate del robot (3D) , formando la traiettoria dell'utensile nel sistema di coordinate del robot, trasferendo le coordinate al robot per il movimento alla posizione successiva della traiettoria.
Esempio di designazione dell'articolo al momento dell'ordine
RF627Smart-Weld.(WAVE)-SMR/MR-Xsmr/Xemr-L1-L2-L5-L6(R)-PS-PB-Shutter- AC(WC)
| Simbolo/forte> | Descrizione |
| (ONDA) | Lunghezza d'onda del laser: 660 nm – nessun simbolo, 450 nm – BLU. |
| SMR | Inizio del campo di misura per Z, mm. |
| SIG | Campo di misura per Z, mm. |
| Xsmr | Campo di misura per coordinata X all'inizio del campo di misura per coordinata Z, mm. |
| Xemr | Campo di misura per coordinata X alla fine del campo di misura per coordinata Z, mm. |
| L1, L2, L5, L6 | Lunghezza cavo, m. |
| R | Cavo robot (opzionale). |
| PS | Tavoletta (opzionale). |
| PB | Unità di protezione (opzione). |
| Otturatore | Otturatore controllato. |
| AС | Sistema di raffreddamento ad aria integrato. |
| WС | Sistema di raffreddamento ad acqua integrato. |
NOTA: opzioni predefinite: soffiante per finestre, finestre sostituibili, schermo, staffa di montaggio.
Esempio RF627Smart-Weld.BLUE-90/250-65/180-3-3-3-10–PS-PB - Scanner con laser blu, SMR - 90 mm, MR - 250 mm, Xsmr - 65 mm, Xemr - 180 mm, cavo L1 = 3 m, cavo L2 = 3 m, cavo L5 = 3 m, cavo L6 = 10 m, tablet, unità di protezione.
Codici prodotto:
| Nome | Codice |
| Tavoletta | P627A01 |
| Switch di rete | P627B01 |
| Unità di protezione | P627C01 |
| Cavo n. 1 | EL04 |
| Cavo n. 2 | P627A02 |
| Cavo n. 5 (per kit con unità di protezione) | E627E09 |
| Cavo #5 (per kit senza unità di protezione) | E627E17 |
| Cavo n. 6 | E627E18 |
VIDEO : https://www.youtube.com/watch?v=a6qSNjFJKSU
Prodotti
Download
Contattaci
Non esitate a contattarci, saremo lieti di soddisfare qualsiasi vostra richiesta di informazione di natura tecnica ed economica,relative alla nostra sensoristica.
Chiedi informazioni